mrpSteering#
Executive Summary#
The intend of this module is to implement an MRP attitude steering law where the control output is a vector of commanded body rates. To use this module it is required to use a separate rate tracking servo control module, such as rateServoFullNonlinear, as well.
Message Connection Descriptions#
The following table lists all the module input and output messages. The module msg connection is set by the user from python. The msg type contains a link to the message structure definition, while the description provides information on what this message is used for.

Figure 1: mrpSteering() Module I/O Illustration#
Msg Variable Name |
Msg Type |
Description |
|---|---|---|
guidInMsg |
Attitude guidance input message. |
|
rateCmdOutMsg |
Rate command output message. |
Detailed Module Description#
The following text describes the mathematics behind the mrpSteering module. Further information can also be
found in the journal paper Speed-Constrained Three-Axes Attitude Control Using Kinematic Steering.
Steering Law Goals#
This technical note develops a new MRP based steering law that drives a body frame \({\mathcal B}:\{ \hat{\mathbf b}_1, \hat{\mathbf b}_2, \hat{\mathbf b}_3 \}\) towards a time varying reference frame \({\mathcal R}:\{ \hat{\mathbf r}_1, \hat{\mathbf r}_2, \hat{\mathbf r}_3 \}\). The inertial frame is given by \({\mathcal N}:\{ \hat{\mathbf n}_1, \hat{\mathbf n}_2, \hat{\mathbf n}_3 \}\). The RW coordinate frame is given by \(\mathcal{W}_{i}:\{ \hat{\mathbf g}_{s_{i}}, \hat{\mathbf g}_{t_{i}}, \hat{\mathbf g}_{g_{i}} \}\). Using MRPs, the overall control goal is
The reference frame orientation \(\mathbf \sigma_{\mathcal{R}/\mathcal{N}}\), angular velocity \(\mathbf\omega_{\mathcal{R}/\mathcal{N}}\) and inertial angular acceleration \(\dot{\mathbf \omega}_{\mathcal{R}/\mathcal{N}}\) are assumed to be known.
The rotational equations of motion of a rigid spacecraft with N Reaction Wheels (RWs) attached are given by Analytical Mechanics of Space Systems.
where the inertia tensor \([I_{RW}]\) is defined as
The spacecraft inertial without the N RWs is \([I_{s}]\), while \(J_{s_{i}}\), \(J_{t_{i}}\) and \(J_{g_{i}}\) are the RW inertias about the body fixed RW axis \(\hat{\mathbf g}_{s_{i}}\) (RW spin axis), \(\hat{\mathbf g}_{t_{i}}\) and \(\hat{\mathbf g}_{g_{i}}\). The \(3\times N\) projection matrix \([G_{s}]\) is then defined as
The RW inertial angular momentum vector \({\mathbf h}_{s}\) is defined as
Here \(\Omega_{i}\) is the \(i^{\text{th}}\) RW spin relative to the spacecraft, and the body angular velocity is written in terms of body and RW frame components as
MRP Steering Law#
Steering Law Stability Requirement#
As is commonly done in robotic applications where the steering laws are of the form \(\dot{\mathbf x} = {\mathbf u}\), this section derives a kinematic based attitude steering law. Let us consider the simple Lyapunov candidate function:
in terms of the MRP attitude tracking error \(\mathbf\sigma_{\mathcal{B}/\mathcal{R}}\). Using the MRP differential kinematic equations
where \(\sigma_{\mathcal{B}/\mathcal{R}}^{2} = \mathbf\sigma_{\mathcal{B}/\mathcal{R}}^{T} \mathbf\sigma_{\mathcal{B}/\mathcal{R}}\), the time derivative of \(V\) is
To create a kinematic steering law, let \({\mathcal{B}}^{\ast}\) be the desired body orientation, and \(\mathbf\omega_{{\mathcal{B}}^{\ast}/\mathcal{R}}\) be the desired angular velocity vector of this body orientation relative to the reference frame \(\mathcal{R}\). The steering law requires an algorithm for the desired body rates \(\mathbf\omega_{{\mathcal{B}}^{\ast}/\mathcal{R}}\) relative to the reference frame make \(\dot V\) in Eq. (9) negative definite. For this purpose, let us select
where \({\mathbf f}(\mathbf\sigma)\) is an even function such that
The Lyapunov rate simplifies to the negative definite expression:
Saturated MRP Steering Law#
A very simple example would be to set
where \(K_{1}>0\). This yields a kinematic control where the desired body rates are proportional to the MRP attitude error measure. If the rate should saturate, then \({\mathbf f}()\) could be defined as
where
A smoothly saturating function is given by
where
Here as \(\sigma_{i} \rightarrow \infty\) then the function \(f\) smoothly converges to the maximum speed rate \(\pm \omega_{\text{max}}\). For small \(|\mathbf\sigma_{\mathcal{B}/\mathcal{R}}|\), this function linearizes to
If the MRP shadow set parameters are used to avoid the MRP singularity at 360 deg, then \(|\mathbf\sigma_{\mathcal{B}/\mathcal{R}}|\) is upper limited by 1. To control how rapidly the rate commands approach the \(\omega_{\text{max}}\) limit, Eq. (15) is modified to include a cubic term:
The order of the polynomial must be odd to keep ${mathbf f}()$ an even function. A nice feature of Eq. (17) is that the control rate is saturated individually about each axis. If the smoothing component is removed to reduce this to a bang-band rate control, then this would yield a Lyapunov optimal control which minimizes \(\dot V\) subject to the allowable rate constraint \(\omega_{\text{max}}\).
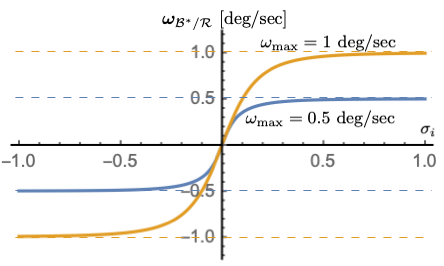
Figure 2: \(\omega_{\text{max}}\) dependency with \(K_{1} = 0.1\), \(K_{3} = 1\)#
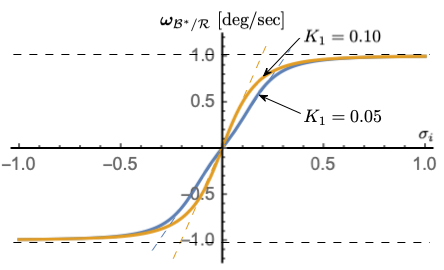
Figure 3: \(K_{1}\) dependency with \(\omega_{\text{max}}\) = 1 deg/s, \(K_{3} = 1\)#
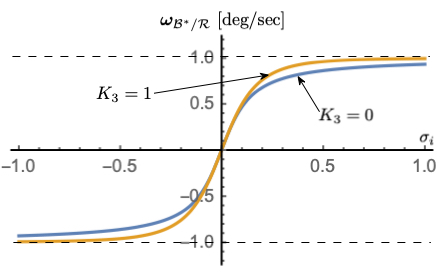
Figure 4: \(K_{3}\) dependency with \(\omega_{\text{max}}\) = 1 deg/s, \(K_{1} = 0.1\)#
Figures 2-4 illustrate how the parameters \(\omega_{\text{max}}\), \(K_{1}\) and \(K_{3}\) impact the steering law behavior. The maximum steering law rate commands are easily set through the \(\omega_{\text{max}}\) parameters. The gain \(K_{1}\) controls the linear stiffness when the attitude errors have become small, while \(K_{3}\) controls how rapidly the steering law approaches the speed command limit.
The required velocity servo loop design is aided by knowing the body-frame derivative of \({}^{B}{\mathbf\omega}_{{\mathcal{B}}^{\ast}/\mathcal{R}}\) to implement a feed-forward components. Using the \({\mathbf f}()\) function definition in Eq. (16), this requires the time derivatives of \(f(\sigma_{i})\).
where
Using the general \(f()\) definition in Eq. (17), its sensitivity with respect to \(\sigma_{i}\) is
Module Assumptions and Limitations#
This control assumes the spacecraft is rigid, and that a fast enough rate control sub-servo system is present.
User Guide#
The module is configured by:
module = mrpSteering.MrpSteering()
module.modelTag = "mrpSteering"
module.setK1(K1)
module.setK3(K3)
module.setOmegaMax(omega_max)
If the outer loop feed-forward term should be ignored:
module.ignoreFeedforward()
Class MrpSteering#
-
class MrpSteering : public SysModel#
Data structure for the MRP feedback attitude control routine.
Public Functions
-
void reset(uint64_t callTime) override#
This method performs a complete reset of the module. Local module variables that retain time varying states between function calls are reset to their default values.
- Parameters:
callTime – The clock time at which the function was called (nanoseconds)
- Returns:
void
-
void updateState(uint64_t callTime) override#
This method takes the attitude and rate errors relative to the Reference frame, as well as the reference frame angular rates and acceleration
- Parameters:
callTime – The clock time at which the function was called (nanoseconds)
- Returns:
void
-
void setK1(const double gain)#
Set the linear feedback gain K1
- Parameters:
gain – [-] linear feedback gain K1
- Returns:
void
-
double getK1() const#
Get the linear feedback gain K1
- Returns:
double
-
void setK3(const double gain)#
Set the cubic feedback gain K3
- Parameters:
gain – [-] cubic feedback gain K3
- Returns:
void
-
double getK3() const#
Get the cubic feedback gain K3
- Returns:
double
-
void setOmegaMax(const double omega)#
Set the maximum rate command of steering control
- Parameters:
omega – [-] maximum rate command of steering control
- Returns:
void
-
double getOmegaMax() const#
Get the maximum rate command of steering control
- Returns:
double
-
void setIgnoreFeedforward(const bool ignore)#
Set whether the outer loop feed-forward is ignored
- Parameters:
ignore – boolean whether the outer loop feed-forward should be ignored
- Returns:
void
-
bool getIgnoreFeedforward() const#
Get whether the outer loop feed-forward is ignored
- Returns:
bool
Public Members
-
Message<RateCmdMsgPayload> rateCmdOutMsg#
rate command output message
-
ReadFunctor<AttGuidMsgPayload> guidInMsg#
attitude guidance input message
-
void reset(uint64_t callTime) override#